")
Tabla de contenido:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:44.
- Última modificación 2025-01-23 14:40.

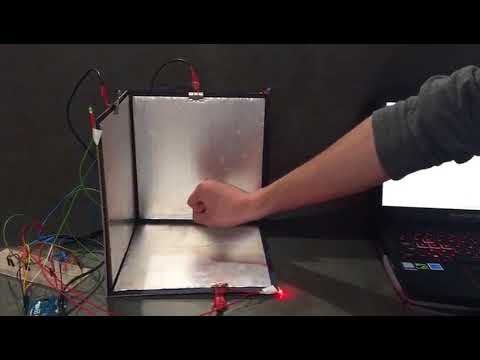

En esta instrucción se explica cómo se puede seguir el movimiento de una mano en un espacio 3D utilizando el principio de detección capacitiva. Al cambiar la distancia entre una lámina de aluminio cargada y su mano, la capacidad del capacitor variará. Este método se puede utilizar como una alternativa de gama baja para que los sistemas ópticos y de inercia sigan el movimiento en el espacio 3D. En este prototipo, agregamos LED que brillarán cuando el objeto se acerque demasiado a la hoja de papel de aluminio.
Paso 1: Herramientas y materiales necesarios
- Resistencia 3x 270k Ohm
- Resistencia 3x 10k Ohm
- Clip de cocodrilo 3x
- 1x LED rojo
- 1x LED azul
- 1x LED verde
- Resistencia 3x 220 Ohm
- soldadura
- encogimiento de calor
- Cable blindado
- Arduino Uno
- Papel de aluminio
- cartón
- Cinta
- Pegamento en aerosol
- Tablero de pruebas
- Cables de conexión (diferentes longitudes)
Paso 2: construcción del marco




Recorta tres trozos cuadrados de cartón (250x250 mm) y tres trozos cuadrados de papel de aluminio (230x230 mm). Aplique pegamento en aerosol a un lado del papel de aluminio y aplique cada uno en los pedazos de cartón. En este prototipo, las láminas de papel de aluminio actuarán como nuestros sensores capacitivos. Por lo tanto, asegúrese de que haya suficiente espacio entre el papel de aluminio y el borde del cartón, para que no haya contacto entre las diferentes hojas de papel una vez ensamblado el marco. Una vez que la lámina se aplica al cartón, es hora de ensamblar las tres piezas de cartón con cinta adhesiva para completar el marco. Nuevamente, asegúrese de que no haya contacto entre las diferentes hojas de papel de aluminio.
Paso 3: cableado de los cables de protección a la placa y Arduino



Es importante utilizar un cable blindado para conectar las láminas al circuito. El uso de cables normales generará un efecto de antena e interferirá con las lecturas del sensor. Asegúrese de tener 3 cables blindados de unos 50 cm de largo. Tome un cable, pele el cable, corte los cables de protección y use solo el cable interior para conectarlo soldando el cable a la pinza de cocodrilo. Asegúrese de aplicar un termocontraíble para cubrir la conexión de soldadura. Sujeta las pinzas de cocodrilo al papel de aluminio.
Conecte todos los cables blindados a la fila positiva de su tablero. Luego, conecta esta fila positiva a la conexión de 5 V en tu Arduino. Ahora tome el cable principal del cable blindado y conecte una resistencia de 10k Ohm y 220k Ohm en paralelo. Conéctelo al puerto de salida de su Arduino (usamos 8, 9 y 10).
Repita este paso otras 2 veces para los otros planos del prototipo.
Paso 4: cableado de los LED




Suelde los extremos de los LED a un cable largo para que pueda llegar a las esquinas de las placas respectivas de la placa arduino.
Usamos los pines 2, 3 y 4 como pines de salida para nuestros LED. Esta salida está conectada a la placa de pruebas y conectada a la pata positiva del LED. La pata negativa del LED se conecta a la resistencia de 330 ohmios. El otro extremo de la resistencia está conectado a la tierra de la placa de pruebas, que está conectada a la tierra del Arduino. Repita esto para los 3 LED. En nuestro prototipo, el LED azul está conectado al plano Y, el LED rojo al plano Z y el LED verde al plano X. Pegue los LED a los planos correspondientes para obtener retroalimentación directa cuando utilice el prototipo.
Si no usa una placa de pruebas y desea conectar el cable blindado directamente al Arduino, puede ver la imagen adjunta para obtener una buena descripción general de las conexiones de soldadura. Tus conexiones finales deberían verse como la imagen general.
Paso 5: codificación
En el adjunto colocamos el código que usamos para este experimento. Para obtener información adicional, después de cada comando principal se coloca un comentario, explicando lo que está sucediendo en el código. Abra el código en su software Arduino en su PC y cárguelo en su Arduino. Si está utilizando una computadora portátil, asegúrese de que se esté cargando; de lo contrario, su prototipo no funcionará.
Paso 6: uso del prototipo
Esta forma de seguimiento de movimiento 3D es muy sensible a las variables circundantes. Por lo tanto, asegúrese de calibrar los valores del código según su propia situación. Simplemente puede usar el monitor en serie para obtener los valores correctos. Sugerencia: puede construir una calibración usted mismo, donde toma los valores promedio + 10% al ejecutar el código. En el video se demuestra cómo debería funcionar correctamente el prototipo.
Recomendado:
Iluminación debajo de la cama con detección de movimiento: 16 pasos (con imágenes)
")
Iluminación debajo de la cama con detección de movimiento: ¿Alguna vez trató de levantarse de la cama en silencio por la noche solo para tropezar con algo y despertar a toda la casa? Las luces nocturnas con detección de movimiento instaladas discretamente debajo de su cama brindan una luz de bajo nivel lo suficientemente brillante como para guiarlo alrededor de esos ladrillos LEGO perdidos
Luz nocturna LED para cama con detección de movimiento automática para bricolaje: 6 pasos (con imágenes)
")
Luz nocturna LED para cama con detección automática de movimiento de bricolaje: Hola, chicos bienvenidos a otro instructivo que siempre lo ayudará en su vida cotidiana y agregará una conveniencia para hacer su vida más fácil. Esto podría ser a veces un salvavidas en el caso de las personas mayores que tienen que luchar para levantarse de la cama
Monitoreo de un terrario de lagarto con el controlador Adosia IoT WiFi + Detección de movimiento: 17 pasos (con imágenes)
")
Monitoreo de un terrario de lagarto usando el controlador Adosia IoT WiFi + Detección de movimiento: en este tutorial, le mostraremos cómo construir un terrario de lagarto simple para un puñado de huevos de eslizón que encontramos y perturbamos accidentalmente mientras hacíamos jardinería al aire libre. así que todo lo que haremos es crear un espacio seguro usando un plast
Cómo construir un robot de seguimiento con brazo de pinza controlado a través de Nrf24l01 Arduino: 3 pasos (con imágenes)
")
Cómo construir un robot de seguimiento de brazo de pinza controlado a través de Nrf24l01 Arduino: la instrucción "Cómo construir un robot de seguimiento de brazo de agarre controlado a través de Nrf24l01 Arduino" explicará cómo construir un brazo de agarre de tres grados de libertad instalado en un camión de orugas impulsado por un módulo L298N de accionamiento de motor dual usando MEG
Salida controlada por movimiento: desde una luz de detección de movimiento: 6 pasos

Salida controlada por movimiento: desde una luz de detección de movimiento: Imagina que eres un truco o trato que va a la casa más aterradora de la cuadra. Después de pasar todos los demonios, fantasmas y cementerios, finalmente llegas al último camino. ¡Puedes ver los dulces en un tazón delante de ti! Pero luego, de repente, un gho