: 4 pasos (con imágenes)")
Tabla de contenido:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:43.
- Última modificación 2025-01-23 14:40.
")
")
Quería controlar mi mini quadrocopter de interior con mi teléfono inteligente, pero no pude encontrar una buena solución para esto. Tenía algunos módulos wifi ESP8266 por ahí, así que decidí hacer uno propio.
El programa inicia un punto de acceso wifi con un sitio web HTML 5 para controlar la señal PPM. La señal PPM se genera por interrupción.
Gracias a HTML5 puede controlar su dispositivo RC con cualquier teléfono inteligente sin ninguna aplicación.
También puede conectarse al sitio web con una PC y usar un joystick para controlar. Por el momento, esto solo funciona en Firefox.
En este inescrutable explicaré cómo configurar el ESP8266 y cómo configurar el receptor en Betaflight.
Paso 1: Lista de piezas

Comencemos con la lista de piezas. Solo necesitas algunos componentes:
- ESP8266: Cualquier módulo debería funcionar. Utilizo el módulo ESP 12-F:
- un convertidor USB a serie de 3, 3 V para cargar el scetch la primera vez. (Después de la primera carga, puede usar la actualización OTA). Use algo como esto:
- un regulador de voltaje de 3, 3V: El ESP8266 necesita 3, 3V. Cualquier voltaje superior a 3, 6 V matará el dispositivo. También puede reducir la corriente máxima de aproximadamente 200 mA. Si no tiene un suministro de 3, 3 V lo suficientemente fuerte en su modelo RC, necesita un regulador de voltaje adicional. Yo uso este regulador reductor con una resistencia de 3, 9K Ohm:
- una PC con Arduino IDE:
- Soporte ESP8266 para Arduino IDE. Siga estas instrucciones:
- Biblioteca Websocket para Arduino:
- Tal vez un cambiador de nivel de 3, 3V / 5V si su decodificador PPM no admite entradas de 3, 3V. Para la mayoría de los controladores de vuelo de quadcopter no es necesario.
- El scetch WifiPPM: descargue el archivo a continuación o
- Un teléfono inteligente o una PC con un joystick y Firefox
Paso 2: Configure la electrónica y cargue el programa

Lo primero que debe hacer es configurar las conexiones de alimentación al ESP8266. Puedes ver el cableado en la imagen. Realice las siguientes conexiones:
RST, EN y VCC a 3, 3V
GPIO15 y GND a GND
Coloque un pequeño condensador entre VCC y GND (aproximadamente 100 nF)
TXD a RXD de su dispositivo USB2Serial
RXD a TXD de su dispositivo USB2Serial
Ponga GPIO0 en GND mientras se enciende para ingresar al modo flash.
Después de haber instalado el IDE de Arduino, el soporte ESP8266 y la biblioteca websocket abren el boceto. Mantenga GIO0 en GND mientras enciende el ESP8266 para ingresar al modo flash. Ahora puedes subir el boceto.
Una vez que haya cargado el boceto, el controlador se reiniciará. Debería encontrar un punto de acceso WIFI llamado WifiPPM. Si está bien, puede apagar el chip y desconectar los cables TXD, RXD y GPIO0. En el futuro, puede actualizar el programa a través de OTA. Para hacerlo, conéctese al punto de acceso y vaya a "192.168.1.4/update" en su navegador web.
Paso 3: sitio web


Ahora puede conectar GPIO5 a la entrada PPM de su controlador de vuelo o lo que use para decodificar la señal PPM.
Después de encender el módulo, puede conectarse al punto de acceso "WifiPPM". No hay contraseña. Abra la dirección 192.168.4.1 en su navegador.
Verá el sitio de la primera imagen. En un dispositivo táctil puedes controlar los sticks con tu pantalla táctil.
Si abre el sitio con una PC, debe usar Firefox. Tan pronto como conecte un joystick, el sitio cambiará al que puede ver en la segunda imagen. Puedes controlar los palos con tu joystick.
En el siguiente paso, explicaré cómo configurar Betaflight, porque lo uso. Si usa algún otro controlador, debe hacerlo usted mismo de ahora en adelante.
Paso 4: Configuración de Betaflight
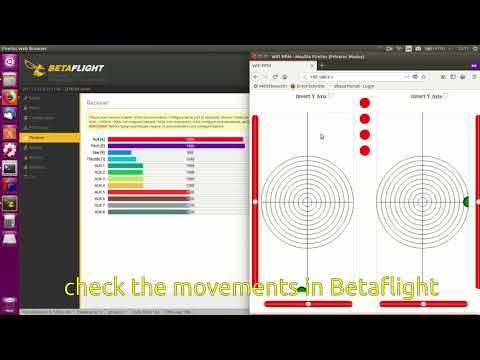
Utilizo el controlador WifiPPM para mi quadcopter con Betaflight. Explico ahora cómo configurarlo.
- Conecte su controlador de vuelo a la PC
- Abrir Betaflight
- conectarse al controlador de vuelo
- ir a la pestaña Receptor
- escriba RTAE1234 en el campo del mapa de canales
- cambie el "Stick Low Threshold" a 1020, el "Stick Center" a 1500 y el "Stick High Threshold" a 1980
- guarda los cambios
- abra el sitio web wifiPPM con su teléfono móvil y pruebe si el ajuste es correcto
Eso es todo. Estás listo. Ahora puedes volar con tu teléfono móvil sin ninguna aplicación adicional.
Recomendado:
Monitor inteligente de plantas para interiores: sepa cuándo su planta necesita riego: 8 pasos (con imágenes)
")
Monitor inteligente de plantas para interiores: sepa cuándo su planta necesita riego: Hace un par de meses, hice una varilla de control de la humedad del suelo que funciona con baterías y se puede pegar en la tierra de la maceta de su planta de interior para brindarle información útil sobre el suelo. el nivel de humedad y los LED parpadean para indicarle cuándo debe
Lámpara Neoboard - No se necesita SD e impresa en 3D: 3 pasos (con imágenes)
")
Lámpara Neoboard: no se necesita SD e impresa en 3D: después de construir una lámpara Minecraft para mi hijo de 7 años, su hermano pequeño quería algo similar. Él está más en SuperMario que en Minecraft, por lo que su luz nocturna mostrará sprites de videojuegos. Este proyecto se basa en el proyecto The Neoboard, pero pa
Reloj LED con 555 y 4017 (no se necesita programación): 8 pasos (con imágenes)
: 8 pasos (con imágenes)")
Reloj LED con 555 y 4017 (no se necesita programación): aquí presentaré un proyecto que diseñé y realicé hace unos 7 años, la idea del proyecto es utilizar circuitos integrados de contador como 4017 para generar señales que controlen el parpadeo de los LED dispuestos como manecillas del reloj analógico
Creación de una aplicación de Android para pequeñas empresas con la aplicación MIT y Google Fusion Table: 7 pasos

Creación de una aplicación de Android para pequeñas empresas con la aplicación MIT y Google Fusion Table: ¿Alguna vez ha querido crear su propia aplicación que puede estar disponible en Google Play Store? Si tiene un negocio, este tutorial cambiará su vida. Después de leer esto detenidamente, podrá crear su propia aplicación. Antes
Cree una aplicación simple para su teléfono inteligente (no se necesita codificación): 10 pasos
: 10 pasos")
Haga una aplicación simple para su teléfono inteligente (no se necesita codificación): ACTUALIZACIÓN: esta técnica es obsoleta, ahora hay varias otras formas de hacer una aplicación … es posible que esto ya no funcione. Mi primera aplicación publicada está disponible para descargar en la aplicación de Android Comercializa aquí. El siguiente es un tutorial rápido sobre cómo prácticamente cualquier