
Tabla de contenido:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:42.
- Última modificación 2025-01-23 14:39.

Hace algún tiempo publiqué mi controlador Wifi PPM. Está funcionando bastante bien. Solo el rango es un poco corto. Encontré una solución para este problema. El ESP8266 admite un modo llamado ESPNOW. Este modo es de un nivel mucho más bajo. No pierde la conexión tan fácilmente y si pierde la conexión se vuelve a conectar inmediatamente.
Yo uso tres ESP8266. Uno es el receptor ESPNOW, el otro es el remitente ESPNOW y el tercero es el punto de acceso al que puede conectarse. El tercero es necesario porque el remitente ESPNOW no puede ser un punto de acceso al mismo tiempo. También agregué algunas antenas para obtener un mejor alcance.
Hay un segundo punto de acceso directamente en el receptor. Si te conectas a este tienes lo mismo que con el antiguo proyecto WifiPPM.
También agregué soporte para el receptor de protocolo MSP. Este es el "Protocolo serie MultiWii" que es compatible con MultiWii, Betaflight, Cleanflight y muchos otros controladores de vuelo.
Paso 1: Lista de piezas




Necesita tres módulos ESP8266 de cualquier tipo. Pero quieres la mejor variedad. Entonces sugiero usar módulos ESP8266 con antenas. Funciona también sin antenas. Utilizo las siguientes partes:
2 x ESP07 (módulo ESP8266 con conector de antena)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX en el lado del receptor
1 x ESP8266 2, 4/5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / macho + Adaptador I-PEX en el lado del remitente
Fuente de alimentación de 3, 3 V para todos los módulos ESP8266
También necesita una PC con Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 compatible con Arduino IDE. Siga estas instrucciones: https://learn.sparkfun.com/tutorials/esp8266-thin…Websocket library para Arduino:
Paso 2: Descargue y actualice los bocetos



Puede descargar los bocetos aquí.
Descomprime el archivo. Hay tres carpetas: Master-AP, Sender, Receiver
Master-AP: Es el boceto del punto de acceso. Abra el boceto con arduino IDE. Establezca la frecuencia de la CPU en 160 MHz en el menú de herramientas y cargue el boceto en el ESP12.
Remitente: Ese es el boceto del remitente de MSPNOW. Establezca la frecuencia de la CPU en 160 MHz y cárguela en uno de los ESP07.
Puede ver en la primera imagen cómo conectar el módulo ESP8266 para flashear.
Ahora conecte el ESP12 (punto de acceso) y los puertos seriales y las conexiones de alimentación del emisor ESP07 (segunda imagen): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Inicie ambos módulos y conéctese al punto de acceso "Long-Range-WifiPPM / MSP". La contraseña es "WifiPPM / MSP"
Abra un navegador y abra la dirección IP 192.168.4.1. Aparecerá el sitio web de control. Haga clic en el botón "Información de Wifi". Aparecerá un cuadro de mensaje con el MAC del remitente y el MAC del receptor.
Abra el boceto del receptor en Arduino IDE. Cambie la línea "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (tercera imagen) a la dirección Mac del remitente que se muestra en el sitio web. El receptor Mac debería estar bien. Asegúrese de que la frecuencia de la CPU esté configurada en 160 MHz y cargue el boceto en el segundo ESP05.
Paso 3: conecte el receptor al controlador de vuelo y configure Cleanflight



Conecte ahora el receptor al controlador de vuelo. Su controlador de vuelo debe tener una salida de 3, 3 voltios con al menos 200 mA. De lo contrario, necesita un regulador de voltaje adicional de 3, 3V.
Conecte GND del ESP a GND del controlador de vuelo. Conecte VCC del ESP a 3, 3V del controlador de vuelo o al regulador de voltaje adicional de 3, 3V.
Puede utilizar la salida PPM o la salida MSP en serie.
Para la salida MSP, conecte TX del ESP8266 a RX de cualquier puerto serie de su controlador de vuelo. (Foto 1)
Para la salida PPM, conecte GPIO5 del ESP8266 a la entrada PPM del controlador de vuelo. (Foto 1)
Después de conectar el ESP, inicie el controlador de vuelo y abra el vuelo limpio. Conéctese con su teléfono móvil al punto de acceso "WifiPPM / MSP". La contraseña es "WifiPPM / MSP"
Para MSP: Abra la pestaña de puertos y configure MSP en el puerto serie que conectó el ESP8266 (Imagen 2). Guarde y reinicie. Vaya a la pestaña de configuración y configure el receptor en "Receptor serie MSP" (Imagen 3). Guarde y reinicie.
Para PPM: Lea en el manual de su controlador de vuelo cómo configurar PPM Vaya a la pestaña de configuración y configure el receptor en "Receptor PPM" (Imagen 4). Guarde y reinicie.
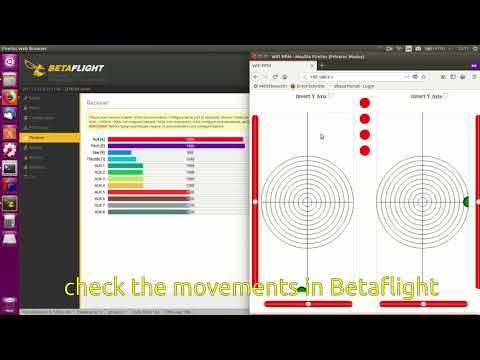
La siguiente configuración es la misma para ambos receptores: Vaya a la pestaña del receptor. Configure los canales en "RTAE1234" (Imagen 5 / Video). Guarde la configuración.
Ahora abra un navegador en su teléfono inteligente. Abra el sitio 192.168.4.1 (Imagen 6). Ahora puedes comprobar el controlador.
Si está funcionando, inicie los dos emisores ESP8266. Conéctese al punto de acceso "Long Range WifiPPM / MSP". La contraseña es "WifiPPM / MSP". Vuelva a abrir el sitio web 192.168.4.1. Verifique nuevamente en cleanflight si está funcionando.
Conecte las antenas a los módulos ESP07.
Paso 4: Más información

Hay dos puntos de acceso en funcionamiento normal. El punto de acceso "WifiPPM / MSP" es como el proyecto WifiPPM anterior. Puede usarlo si solo desea hacer un vuelo rápido sin conectar ningún módulo adicional cuando no necesita una conexión de largo alcance. Si se conecta a "Long Range WifiPPM / MSP", el controlador de largo alcance toma el control.
Quizás quieras saber cuánto es "largo alcance". De hecho, realmente no lo sé. Son al menos unos cientos de metros. Pero no pude probarlo hasta ahora. No pierde conexión en todo mi piso.
Agregué el control MSP porque pensé que podría crear un canal trasero para datos de telemetría. Pero eso nunca funcionó de manera estable. De todos modos, el protocolo MSP es más preciso que ppm, porque no depende tanto de la sincronización. Tal vez cause problemas con los controladores de vuelo lento porque hay mucho tráfico en el puerto serie. Con mi controlador de vuelo Noxe F4 funciona sin problemas.
Si tiene algún problema de configuración, consulte el antiguo proyecto WifiPPM.
Recomendado:
Estación meteorológica de largo alcance HC-12 y sensores DHT: 9 pasos

Estación meteorológica de largo alcance HC-12 y sensores DHT: En este tutorial aprenderemos cómo hacer una estación meteorológica remota de larga distancia usando dos sensores dht, módulos HC12 y la pantalla LCD I2C. ¡Vea el video
Introducción a los sensores inalámbricos de temperatura y vibración de largo alcance: 7 pasos

Introducción a los sensores inalámbricos de temperatura y vibración de largo alcance: A veces, la vibración es la causa de problemas graves en muchas aplicaciones. Desde los ejes y cojinetes de la máquina hasta el rendimiento del disco duro, la vibración causa daños en la máquina, reemplazos tempranos, bajo rendimiento e inflige un gran impacto en la precisión. Vigilancia
Transmite Radio FM de LARGO ALCANCE SOLAMENTE con Rashpberry Pi !!: 6 Pasos

Transmitir radio FM DE LARGO ALCANCE SOLAMENTE con Rashpberry Pi !!: Yo, todos, sí, volví a " enseñar ", pasado mucho tiempo desde el último instructable que escribí, pero estaba aprendiendo más para " enseñar " ustedes más. Así que comencemos. Muchos de ustedes deberían pensar en los mulos y otros componentes que
Indicador de nivel de agua inalámbrico de largo alcance con alarma - Alcance hasta 1 km - Siete niveles: 7 pasos

Indicador de nivel de agua inalámbrico de largo alcance con alarma | Alcance hasta 1 km | Siete niveles: Míralo en Youtube: https://youtu.be/vdq5BanVS0Y Es posible que hayas visto muchos indicadores de nivel de agua con cable e inalámbricos que proporcionarían un alcance de hasta 100 a 200 metros. Pero en este instructivo, verá un indicador de nivel de agua inalámbrico de largo alcance
Escáner WiFi de largo alcance con ESP8266: 6 pasos (con imágenes)
")
Escáner WiFi de largo alcance con ESP8266: En este Instructable, hago un dispositivo de escaneo WiFi portátil de 2.5 bandas de largo alcance y alimentado por batería que se usa para determinar qué canal es el mejor para mi red doméstica. También se puede utilizar para encontrar puntos de acceso WiFi abiertos sobre la marcha. Costo de fabricación: alrededor de $ 25 dolla