")
Tabla de contenido:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:43.
- Última modificación 2025-01-23 14:40.

¡Bienvenido a mi primer instructable
El proyecto que quiero compartir con ustedes hoy es el juego de laberinto Arduino, que se convirtió en una consola de bolsillo tan capaz como Arduboy y consolas similares basadas en Arduino. Se puede flashear con mis (o sus) juegos futuros gracias al encabezado ICSP expuesto.
Hace unos meses tuve una idea para construir un juego de laberintos en Arduino, pero sin un conjunto de laberintos codificados. Debería poder generar un nuevo laberinto para cada nivel que estés jugando, de modo que nunca vuelvas a ver el mismo laberinto:)
Codificar esto fue un desafío, ya que Arduino tiene una memoria RAM limitada, y luego encontré algunos ejemplos de cómo se puede hacer esto con un algoritmo simple de Bo-Taoshi.
Código que usé como punto de partida que tomé por SANUKI UDON y su proyecto CÓMO HACER UN GENERADOR DE LABERINTO USANDO ATTINY13A
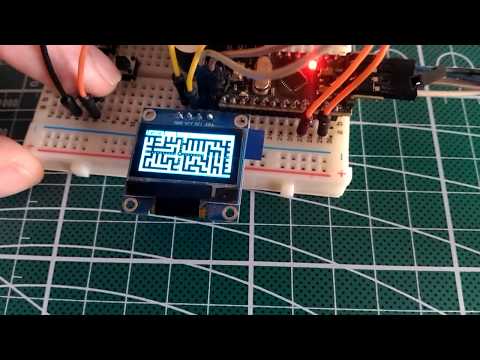
Paso 1: creación de prototipos de placa de pruebas


Mi punto de partida fue con una pequeña placa de pruebas con solo 4 botones conectados para moverme por el laberinto, pero más tarde, cuando decidí que debería ser una consola de juegos, agregué algunos botones más. En una placa de pruebas más grande, puede ver 2 botones más, y luego agregué un tercero para usarlo como botón de inicio / pausa / menú
Paso 2: Piezas necesarias
- Chip Arduino pro mini / Arduino Uno / Atmega328P
- Toma DIP de 28 pines (opcional)
- Pantalla OLED SSD1306
- Altavoz piezoeléctrico
- Botones pulsadores - 7 piezas
- Soportes de batería de celda de moneda
- Interruptor de palanca
- Alambres
- PCB prototipo (60x40 mm)
Paso 3: Esquema / cableado de la placa de pruebas



Conexión de componentes como se muestra en el diagrama anterior.
Botones:
- Botón ARRIBA: Pin 7 de Arduino
- Botón ABAJO: Pin 6 de Arduino
- Botón IZQUIERDO: Pin 9 de Arduino
- Botón DERECHA: Pin 8 de Arduino
- Botón A: pin 5 de Arduino
- Botón B: pin 4 de Arduino
- Botón de INICIO: Pin 2 de Arduino
Pantalla OLED SSD1306:
- SCL: pin A5 de Arduino
- SDA: Pin Arduino A4
- VCC: Arduino VCC
- GND: Arduino GND
Zumbador:
- Zumbador positivo: pin 3 de Arduino
- Tierra del zumbador: Arduino GND
Paso 4: código fuente
El código fuente del juego A-Maze se puede encontrar aquí:
Abra en Arduino IDE y cárguelo en su placa o use el programador ISP para programar su chip.
Recomiendo usar USBTIny ISP, nunca tuve problemas con él:) pero también puede usar Arduino ordinario para programar su chip.
En mi caso, no utilicé cristal externo, por lo que mi chip Atmega328p funciona en un oscilador interno que es de 8MhZ.
Para obtener más información, visite este enlace:
Paso 5: míralo en acción

Paso 6: caja y miniaturización


Si desea que este proyecto sea permanente, con un estuche atractivo, aquí está el estuche simple imprimible en 3D que diseñé:
En las imágenes de arriba puede ver cómo están dispuestos todos los componentes en el prototipo de PCB de 4x6.
La mayoría del cableado de los botones va debajo de los soportes de la batería, trate de hacerlo lo más sencillo posible, de modo que los soportes de la batería puedan encajar relativamente al ras sobre la placa con cables entre ellos.
También recomiendo hacer otro cableado debajo de la pantalla, ya que las patas del chip Atmega están soldadas y expuestas debajo de la pantalla. Cuando haya terminado de soldar, coloque un poco de cinta aislante debajo de la pantalla para evitar cortocircuitos, etc.
El encabezado ICSP es opcional, y si decide no exponerlo, hará que su ensamblaje sea mucho más fácil, 6 conexiones menos de las que ocuparse, pero programe el chip primero antes de soldarlo, o use el zócalo DIP de 28 pines para que pueda hacerlo fácilmente Retire el chip para programar.


Finalista en el concurso de bolsillo
Recomendado:
Oficina con pilas. Sistema solar con paneles solares y turbina eólica con conmutación automática Este / Oeste: 11 pasos (con imágenes)
")
Oficina con pilas. Sistema solar con paneles solares y turbina eólica con conmutación automática de este a oeste: El proyecto: Una oficina de 200 pies cuadrados debe funcionar con baterías. La oficina también debe contener todos los controladores, baterías y componentes necesarios para este sistema. La energía solar y eólica cargará las baterías. Hay un pequeño problema de solo
Cómo: Instalación de Raspberry PI 4 Headless (VNC) con Rpi-imager e imágenes: 7 pasos (con imágenes)
 con Rpi-imager e imágenes: 7 pasos (con imágenes)")
Cómo: Instalar Raspberry PI 4 Headless (VNC) con Rpi-imager e imágenes: planeo usar este Rapsberry PI en un montón de proyectos divertidos en mi blog. No dudes en comprobarlo. Quería volver a usar mi Raspberry PI, pero no tenía un teclado ni un mouse en mi nueva ubicación. Ha pasado un tiempo desde que configuré una Raspberry
Inteligencia artificial y reconocimiento de imágenes con HuskyLens: 6 pasos (con imágenes)
")
Inteligencia artificial y reconocimiento de imágenes con HuskyLens: ¡Hola, chicos! Akarsh aquí de CETech. En este proyecto, vamos a echar un vistazo a HuskyLens de DFRobot. Es un módulo de cámara impulsado por inteligencia artificial que es capaz de realizar varias operaciones de inteligencia artificial como el reconocimiento facial
Reconocimiento de imágenes con placas K210 y Arduino IDE / Micropython: 6 pasos (con imágenes)
")
Reconocimiento de imágenes con placas K210 y Arduino IDE / Micropython: ya escribí un artículo sobre cómo ejecutar demostraciones de OpenMV en Sipeed Maix Bit y también hice un video de demostración de detección de objetos con esta placa. Una de las muchas preguntas que la gente ha hecho es: ¿cómo puedo reconocer un objeto que la red neuronal no está tr
Gesture Hawk: Robot controlado por gestos con la mano utilizando una interfaz basada en procesamiento de imágenes: 13 pasos (con imágenes)
")
Gesture Hawk: robot controlado por gestos con la mano que utiliza una interfaz basada en procesamiento de imágenes: Gesture Hawk se presentó en TechEvince 4.0 como una sencilla interfaz hombre-máquina basada en el procesamiento de imágenes. Su utilidad radica en el hecho de que no se requieren sensores adicionales o wearables excepto un guante para controlar el automóvil robótico que funciona en diferentes