")
Tabla de contenido:
- Paso 1: observe cómo funciona mi proyecto
- Paso 2: Obtén todo el material
- Paso 3: cargue el programa en la placa Arduino
- Paso 4: coloque las pistas y haga el diseño
- Paso 5: un esquema de circuito siempre es útil
- Paso 6: Conecte los desvíos a la salida de la placa de controlador L298N
- Paso 7: conecte la pista del alimentador de energía a la otra salida de la placa del controlador L298N
- Paso 8: Conecte la placa del controlador L298N a los pines de alimentación de la placa Arduino
- Paso 9: conecte el sensor a la placa Arduino
- Paso 10: conecte los pines de entrada del controlador del motor a la placa Arduino
- Paso 11: coloque el tren en las vías
- Paso 12: Encienda la configuración
- Paso 13: ¡Listo
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:40.
- Última modificación 2025-01-23 14:39.

Hacer maquetas de trenes es un gran pasatiempo, ¡automatizarlo lo hará mucho mejor! Echemos un vistazo a algunas de las ventajas de su automatización:
- Operación de bajo costo: todo el diseño está controlado por un microcontrolador Arduino, utilizando un controlador de motor L298N, su costo es casi nulo en comparación con los paquetes de energía y los aceleradores de control de trenes tradicionales.
- Ideal para colocar en una pantalla: dado que no se requiere interferencia humana para mantener un control en el diseño, puede usarlo en una pantalla donde no puede estar siempre presente para controlar el tren y los desvíos.
- Ideal para aficionados a los microcontroladores: si está o quiere comenzar con Arduino y la programación, este es un gran proyecto para que practique sus habilidades.
Si estás interesado, también puedes consultar la versión anterior de este proyecto que es aún más sencilla.
Así que, sin más preámbulos, ¡comencemos!
Paso 1: observe cómo funciona mi proyecto


Paso 2: Obtén todo el material

Para comenzar, asegúrese de tener todo lo siguiente:
- Se prefiere una placa de microcontrolador Arduino, UNO.
- Una placa de controlador de motor de doble puente H L298N.
- 6 cables de puente macho a macho.
- 7 cables de puente macho a hembra.
- Un destornillador
- Un adaptador de fuente de alimentación de 12 voltios CC.
- Un segmento de pista con sensor de proximidad IR adjunto en la parte inferior (usé una pista Kato S62)
Paso 3: cargue el programa en la placa Arduino
Descargue el IDE de Arduino desde aquí si no lo tiene en su computadora. Luego descargue y abra el archivo dado.
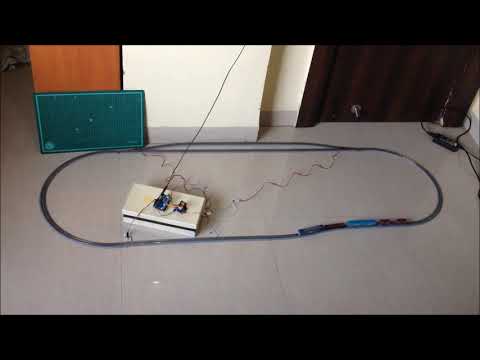
Paso 4: coloque las pistas y haga el diseño

Haga un bucle ovalado con un revestimiento de paso como se muestra arriba. Asegúrese de que la distancia entre la vía del sensor y el primer desvío que cruzará el tren después de cruzar la vía del sensor sea mayor que la longitud del tren, de modo que ninguna parte del tren esté sobre la vía del sensor cuando cruce el desvío.
Paso 5: un esquema de circuito siempre es útil

Haga clic en la imagen para obtener una vista completa. Asegúrese de revisar el esquema completo del circuito y todos los detalles antes de continuar.
Paso 6: Conecte los desvíos a la salida de la placa de controlador L298N




Conecte los cables rojo y negro de ambos desvíos respectivamente entre sí, lo que dará como resultado una conexión en paralelo. Luego, conecte los cables rojos a la salida 4 y los cables negros a la terminal out3 de la placa del controlador del motor.
Paso 7: conecte la pista del alimentador de energía a la otra salida de la placa del controlador L298N


Conecte el cable blanco del alimentador de energía a la salida 1 y el cable azul a la terminal out2 de la placa del controlador del motor.
Paso 8: Conecte la placa del controlador L298N a los pines de alimentación de la placa Arduino

Conecte el pin de 12 voltios al pin VIN de la placa Arduino, el pin GND al pin GND de la placa Arduino y, preferiblemente, el pin de 5 voltios del controlador del motor al pin de 5 voltios de la placa Arduino.
Paso 9: conecte el sensor a la placa Arduino

Conecte el pin VCC del sensor al pin de 5 voltios de la placa Arduino, el pin GND al pin GND de la placa Arduino y el pin OUT al pin A0 de la placa Arduino.
Paso 10: conecte los pines de entrada del controlador del motor a la placa Arduino

Conecte los pines digitales de la placa Arduino a los pines de entrada de la placa del controlador del motor de la siguiente manera:
- D9 a IN1
- D10 a IN2
- D11 a IN3
- D12 a IN4
Paso 11: coloque el tren en las vías

Después de verificar todas las conexiones de cableado, coloque el tren en el revestimiento.
Paso 12: Encienda la configuración

Encienda la configuración y asegúrese de que los desvíos se cambien al revestimiento, si no, simplemente invierta las conexiones de los desvíos realizadas con el controlador del motor. Además, asegúrese de que el tren comience a moverse hacia adelante. Invierta la conexión de la vía de alimentación con el conductor del motor si el tren se mueve en la dirección incorrecta.
Paso 13: ¡Listo
El proyecto está completo, por ahora. Puede jugar con el código Arduino para cambiar la funcionalidad del diseño, agregar más apartaderos, ¡todo es personalizable! Me encantaría saber sobre cualquier modificación que realice en este proyecto, hágamelo saber en los comentarios a continuación. ¡Todo lo mejor!
Recomendado:
Diseño de ferrocarril modelo automatizado simple - Controlado por Arduino: 11 pasos (con imágenes)
")
Diseño de ferrocarril modelo automatizado simple | Controlado por Arduino: los microcontroladores Arduino son una gran adición al modelo de ferrocarril, especialmente cuando se trata de automatización. Aquí hay una manera simple y fácil de comenzar con la automatización de ferrocarriles modelo con Arduino. Así que, sin más preámbulos, ¡comencemos
Diseño de modelo de ferrocarril con revestimiento de paso automatizado (V2.0): 13 pasos (con imágenes)
: 13 pasos (con imágenes)")
Diseño de maqueta de ferrocarril con revestimiento de paso automatizado (V2.0): este proyecto es una actualización de uno de los proyectos de automatización de maquetas de ferrocarril anteriores, el diseño de maqueta de ferrocarril con revestimiento automatizado. Esta versión añade la función de acoplamiento y desacoplamiento de la locomotora con el material rodante. La operación de
Bucle de ferrocarril modelo automatizado simple con revestimiento de patio: 11 pasos

Bucle de ferrocarril modelo automatizado simple con revestimiento de patio: este proyecto es una versión mejorada de uno de mis proyectos anteriores. Esto utiliza un microcontrolador Arduino, una gran plataforma de creación de prototipos de código abierto, para automatizar el diseño de un modelo de ferrocarril. El diseño consta de un bucle ovalado simple y un salvado de revestimiento de patio
Modelo de ferrocarril punto a punto automatizado con revestimiento de patio: 10 pasos (con imágenes)
")
Ferrocarril modelo punto a punto automatizado con revestimiento de patio: los microcontroladores Arduino abren grandes posibilidades en el ferrocarril modelo, especialmente cuando se trata de automatización. Este proyecto es un ejemplo de tal aplicación. Es una continuación de uno de los proyectos anteriores. Este proyecto consta de un punto
Maqueta de ferrocarril - Estación de comando DCC con Arduino :: 3 pasos

Ferrocarril modelo - Estación de comando DCC con Arduino :: Actualizado en agosto de 2018 - ver nuevo Instructable: https: //www.instructables.com/id/Model-Railroad-DC … Actualización 28 de abril de 2016: Ahora capacidad de control de 16 puntos / desvíos a la estación de comando. Los desvíos T1 - T8 están disponibles mediante la tecla 'B' Los desvíos T9 - T1